Cyborg Snail (XD)
a robot serving user on desktop with multiple functions and control methods for both work and fun
July 2022
course
The project was scored A+ (honorable) in the course Contemporary Electronic Design.
Advisor: Prof. Zhaohui Ye.
Collaborator: Awesome Haolin Wang and Yifei He.
demostration
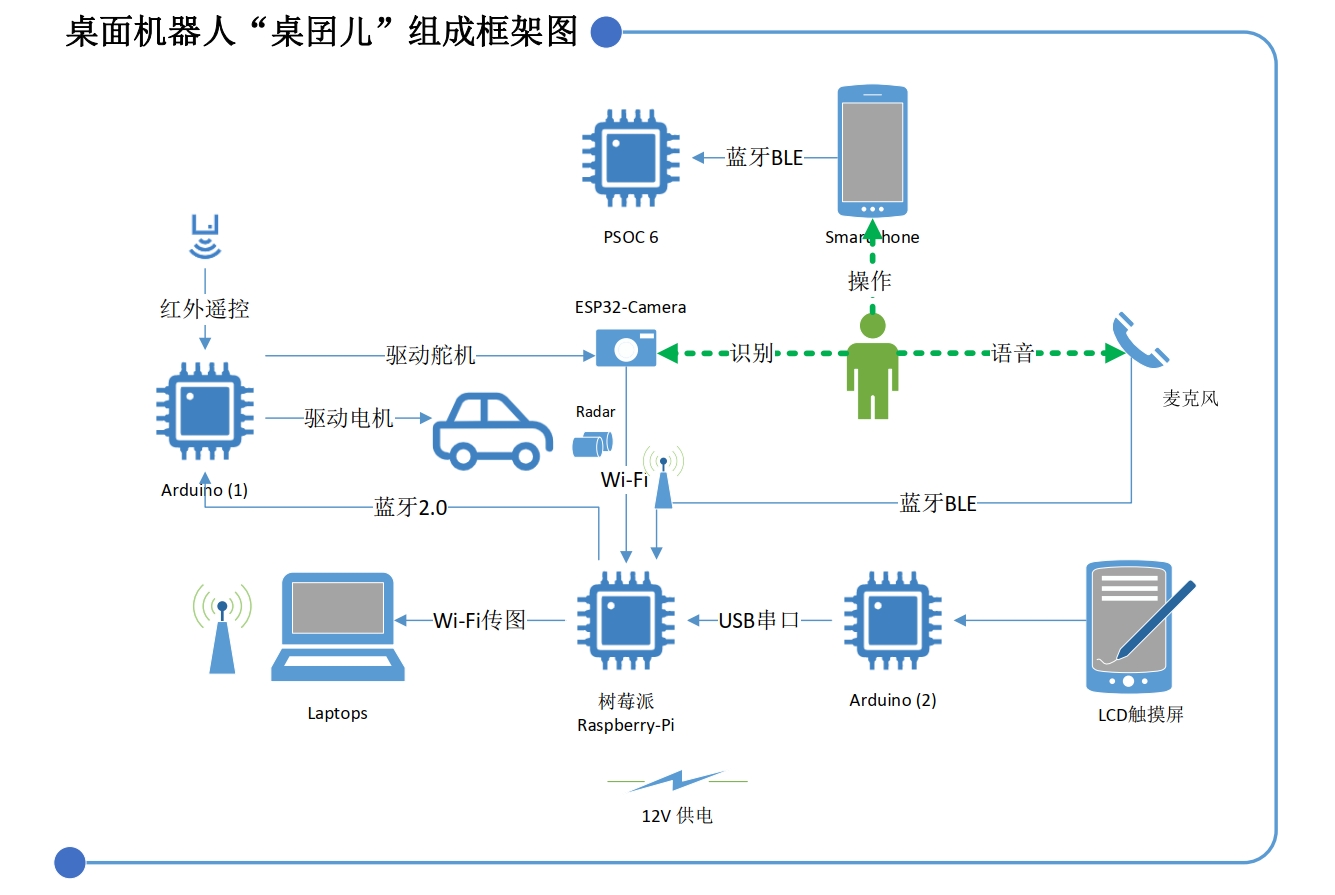
the Cyborg Snail has an eye (camera on a rotatable rod), a shell (wooden box), 4 feet (Mecanum wheels), a group of antennas (ultrasonic radar, Bluetooth transceiver, Infrared receiver), cyber-skin (an e-ink display screen), tactile skin (a LCD touch screen), skeletons (frames and wires), muscles (mini motors), a heart (12VDC battery), a lantern (LED light), and most importantly, a brain (including a Rasperberry Pi 3B+ and 2 Arduino Unos)
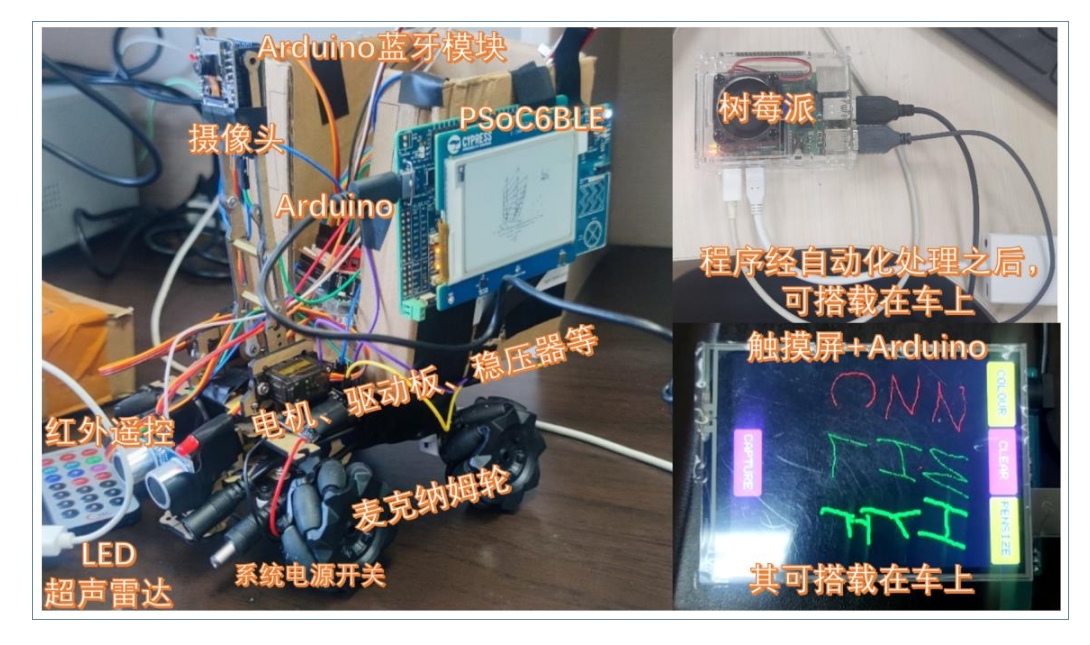
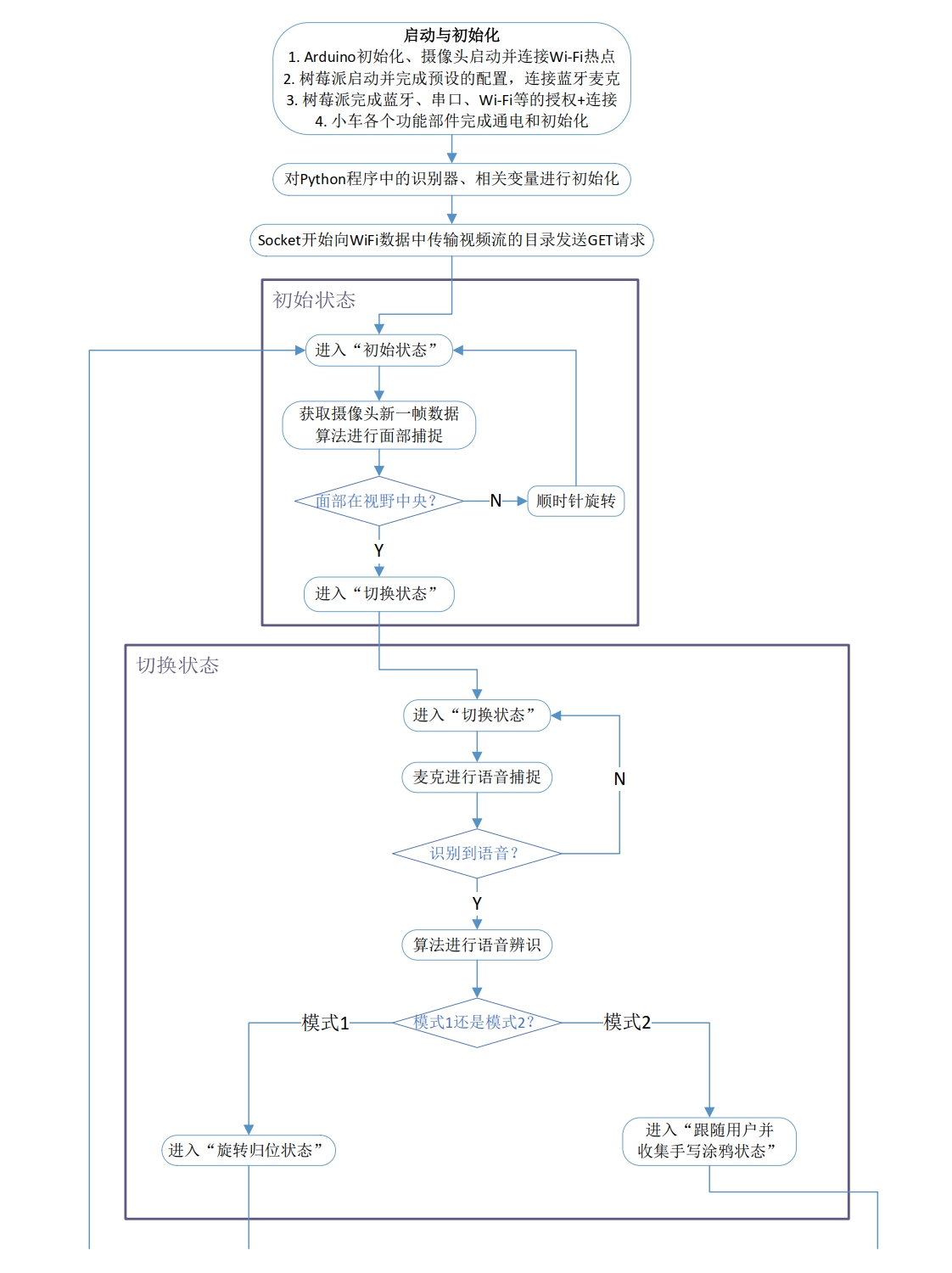
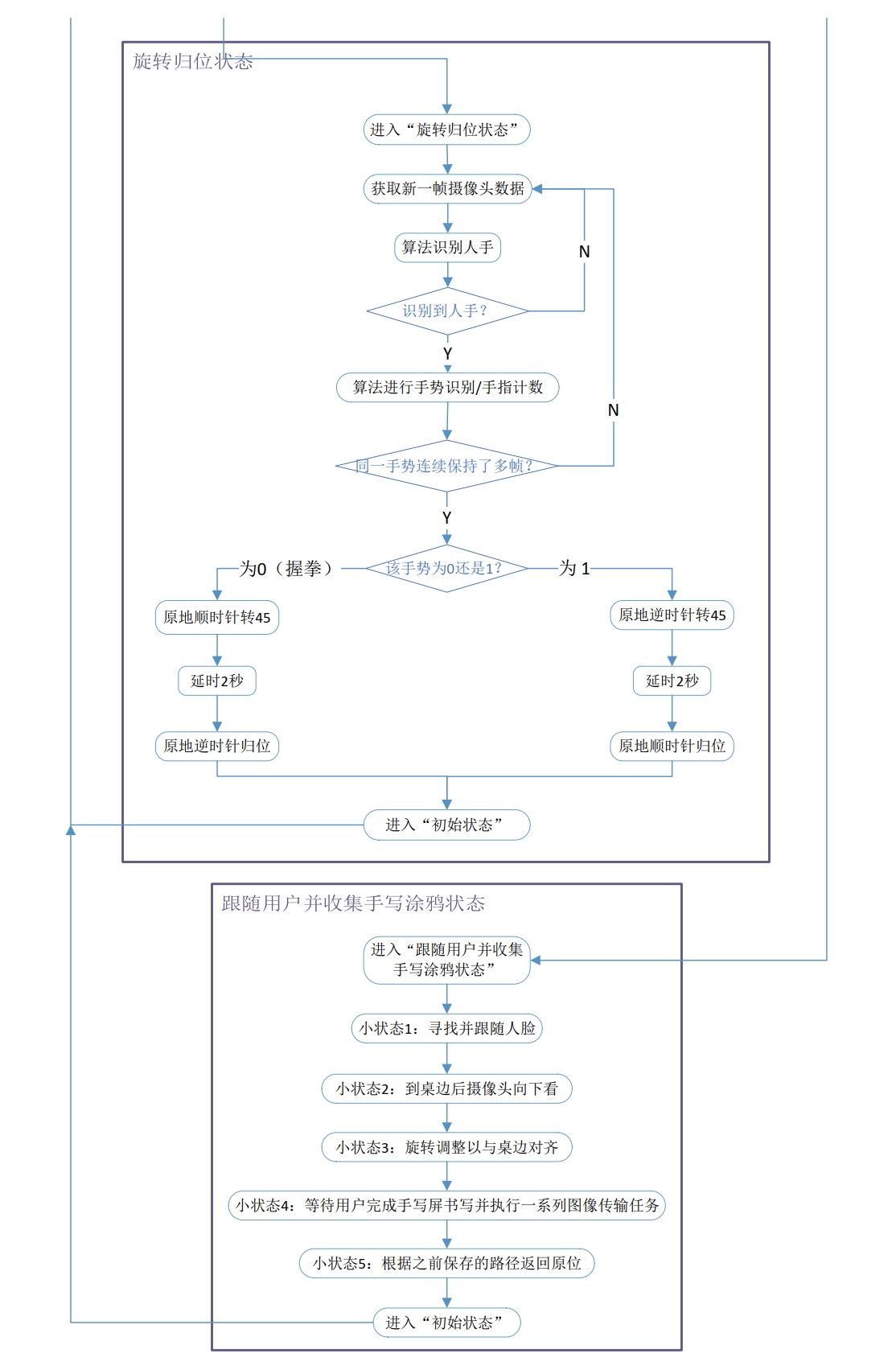
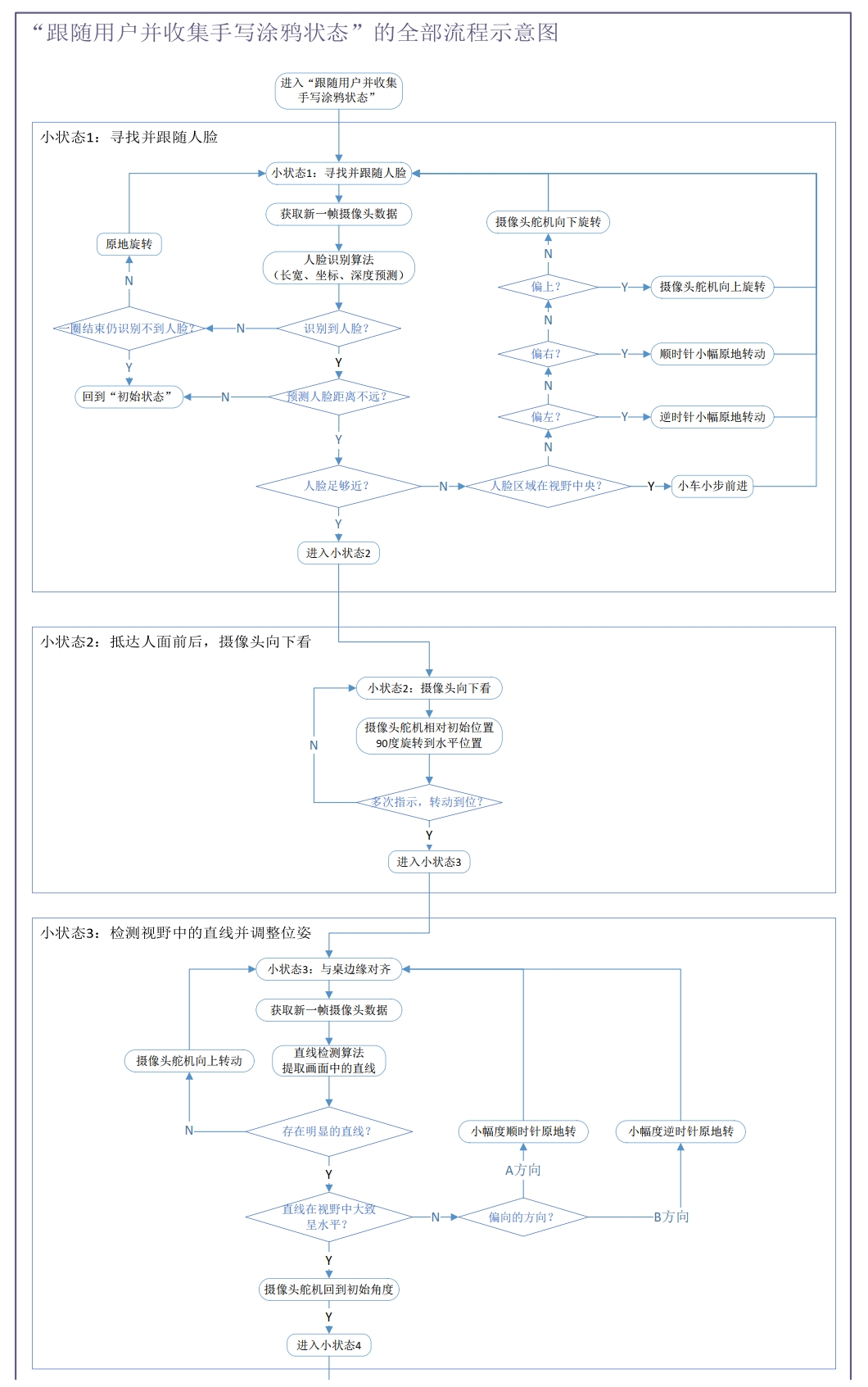
It can interact with user, for example, spinning in-place, moving towards user, observing the environment with its snail-like eyes moving around, wandering on the desk with caution to avoid falling, going back to its home position for charging, and so on. User can use hand gestures, Bluetooth, touch screen, or radar/infrared... to control it. Commands are recorded, preliminarily processed by programmable on-chip system (PSoC). Then PSoC sends the signal to the brain and brain controls the other part of the body. Feedback information is sent to the e-ink display screen and show up as notification.
The biggest problem was the speed. It was so slow like a real snail that we have to speed up the video to save some time. The reason, we thought, was first because of the overheat of the brain which made the electronic units performance decrease. Another reason was probably its heavy weight.
file instruction (in Chinese)
![]()
illustration (in Chinese)
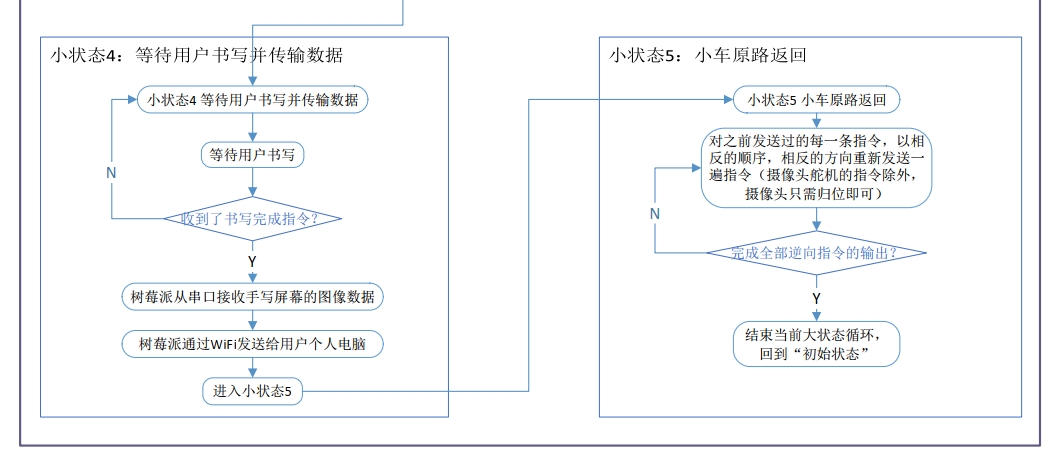
We completed: reasonable power supply voltage provision and appropriate voltage conversion modules, logic for controlling and lighting up each pixel on the display screen with each binary bit, processing of touch capacitance signals, logic for signal transmission and reception for each sensor, logic for camera photography and pixel storage and signal output, FPGA bus logic, PSoC on-chip multi-process management, inter-core communication, control algorithms for servos, design of the overall structure of the robot, internal wiring and pin soldering of the robot, writing of runtime state machine logic, other core software algorithms such as recognition algorithm programming, and so on.